External Water Management (EWM) is crucial for ensuring driver comfort and safety, particularly under adverse weather conditions. Effective EWM reduces visibility issues, prevents water accumulation on critical surfaces, and limits rain-induced soiling of the vehicle exterior. Optimizing EWM around the A-pillar is inherently challenging due to structural considerations, as well as aerodynamic and acoustic performance requirements. To address these challenges efficiently within short development cycles, ICON now provides the ability to simulate these conditions, accurately predicting A-pillar overflow and the extent to which it will affect side window visibility. This is achieved using complex physical models made available within the iconCFD L2P module that account for mass and energy transfer between three distinct phases — air, rain droplets, and the surface water film.
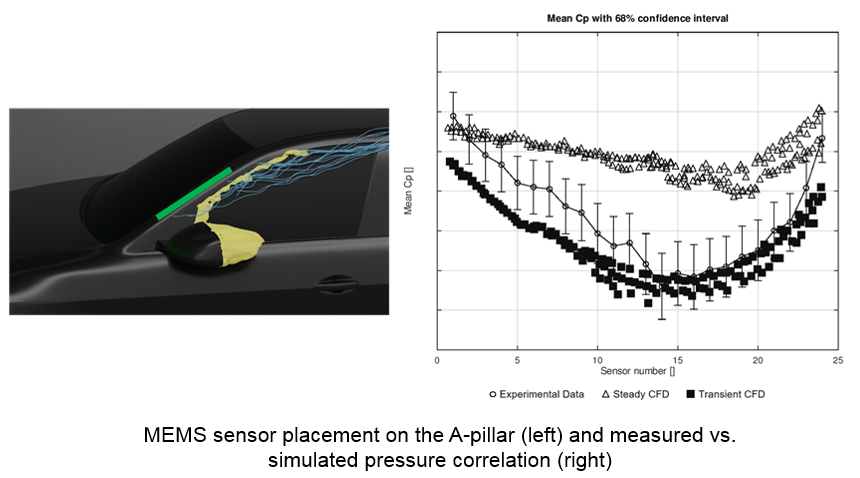
Accurate airflow prediction is essential for capturing the water transport and overflow around the A-pillar. Detached-Eddy Simulation (DES) is more accurate than steady RANS for predicting the unsteady flow structures near the A-pillar, as confirmed by Micro-Electro-Mechanical Systems (MEMS) sensor data.
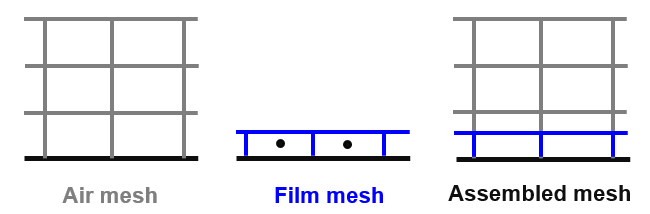
The surface water film is represented using a thin-film approach with a single-layer mesh extruded from the car surface. On a detailed vehicle geometry, features of interest can be as small as ~1 mm. A robust, automated local mesh refinement strategy is crucial to achieve this resolution efficiently without generating an excessively large number of cells that would unnecessarily increase simulation time. iconCFD Mesh provides the right balance of automation, speed, and geometric accuracy allowing the generation of a mesh including the film to air coupling interface in less than an hour on a full vehicle.
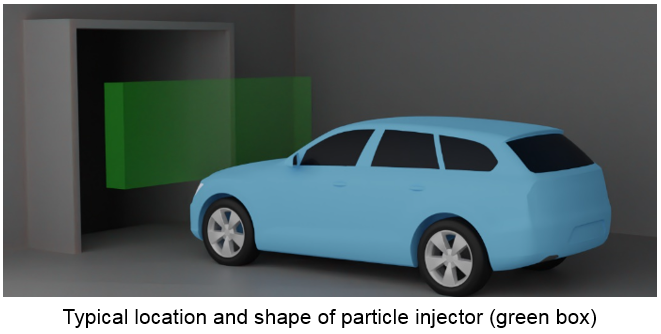
Rain is modeled using Lagrangian spherical particles with diameters ranging from 0.2 to 2 mm, injected ahead of the vehicle within a defined box-shaped region. Advanced wall interaction models account for droplet absorption, rebound, spreading, and splash, allowing smooth transition from discrete droplets to surface water film.
One-way coupling between air and water film is employed. For surface contamination resulting from direct particle impacts, stronger coupling with the air phase can be required if the Stokes number is high, indicating significant particle–air interaction. In the context of A-pillar overflow, however, this simplified approach is sufficient and provides a good balance between computational efficiency and physical accuracy.
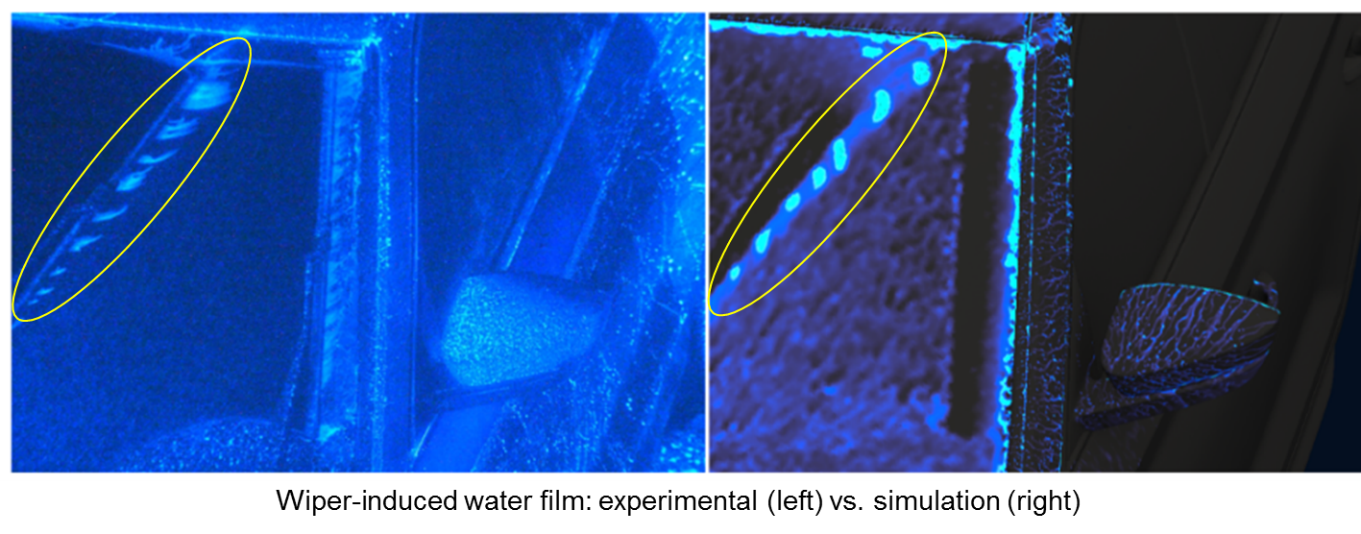
Wiper effects are included via a purposely-built parametric immersed boundary method (IBM), which introduces wiper-induced water flux without having to explicitly move the wiper geometry. This innovative approach eliminates the overhead of traditional IBM or overset mesh methods, increasing solver runtime by only ~9% compared to simulations without wipers. Despite its simplicity, it provides a solution that is not only efficient but realistic.
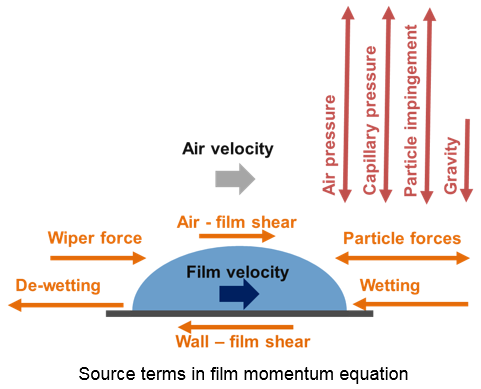
The water film is governed by forces acting tangentially and normally on the substrate surface (car surface), originating from airflow, wipers, gravity, and other effects. The model also relies on empirical coefficients, which are carefully calibrated to reproduce correct behaviour under different rainfall and airflow conditions. Accurate resolution of the airflow, especially in the near-wall region, is critical, as it directly influences several source terms and ultimately the fidelity of the water film simulation. The numerous source terms at play make the model inherently complex and can pose challenges from a numerical stability standpoint. These challenges were overcome in the solvers and schemes implemented in iconCFD.
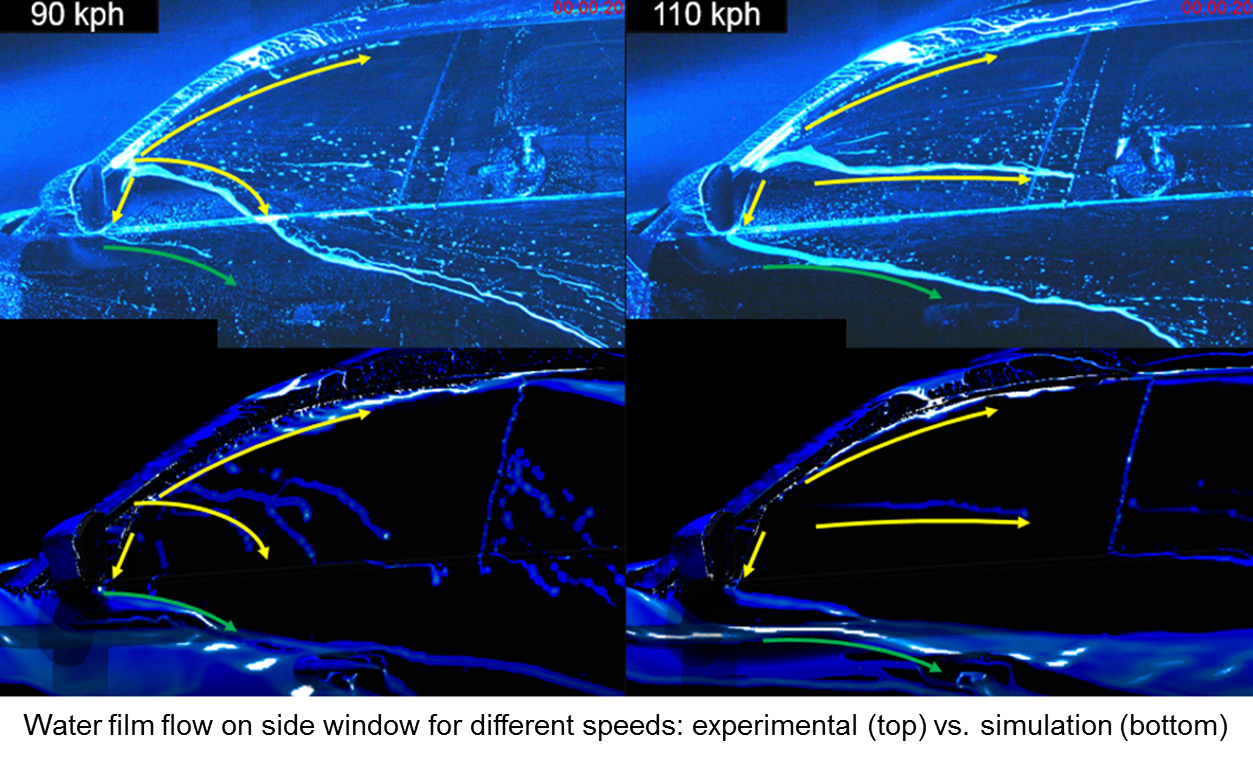
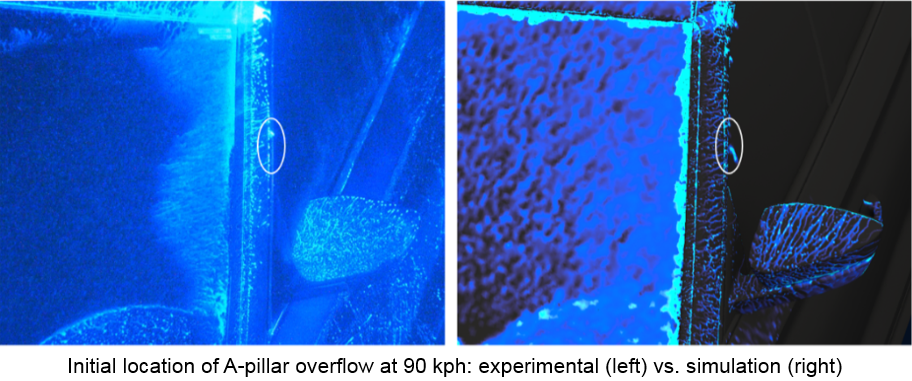
The method was validated on the prediction of A-pillar overflow and water transport on the side window of a test vehicle provided by Škoda Auto at vehicle speeds of 90, 110, and 130 kph. The simulations represent 10 seconds of real-world rainfall. Comparisons with wind tunnel data show that the model predicts the location of the “breaching point” on the A-pillar accurately. Beyond this point, the water film on the side window, including streaks and flow patterns, is well represented. Overall, the methodology provides qualitatively satisfactory predictions of water transport and accumulation patterns.
Using iconCFD based EWM methodology we are able to augment high-fidelity aerodynamic simulations with accurate prediction of A-pillar overflow and side window soiling. Rainfall behaviour, film transport and wiper effects, are all taken into account without adding significant cost over the base simulation.
For readers interested in more technical details, the methodology is further described in the paper, “Efficient CFD methods for assessment of water management” co-published with Škoda Auto.
ICON gratefully acknowledge the close collaboration and support of Škoda Auto a.s., including access to analysis results, vehicle geometries, and experimental data.
© ICON 2025. All rights reserved. | Legal | Website by FocusedCRE